MOTOR CONTROLLER TO OPEN8 INTERRUPT INTERFACE
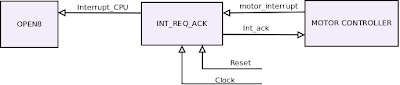
The Interrupt from the motor controller to the CPU needs to be high for 1 clock cycle. There is not interrupt acknowledge signal from the Open8 CPU that can turn off the interrupt after 1 clock signal. If the motor controller interrupt is more than one clock cycle, The CPU interprets it as a separate request. So there is a need for a moderator that Receives an interrupt request from the motor controller Responds to the interrupt by sending a signal to the CPU interrupt line which is high for exactly one clock cycle. After sending the interrupt request to the CPU, sends an interrupt acknowledge signal to the motor controller. This moderator is Int_req_ack module. The Int_req_ack module has a 2 bit counter which is initialized to “00”. When the motor interrupt goes high, the counter is incremented by 1 every clock cycle and the interrupt_CPU line goes high. Since we need the interrupt_CPU line to be high for exactly one clock signal, the counter is rese...




